A system of m linear equations in n unknowns has a solution if and only if the
rank r of the augmented matrix equals that of the coefficient matrix.
If the two matrices have the same rank r and r = n, the solution is unique.
If the two matrices have the same rank r and r < n, then at least one set of r
of the unknowns can be solved in terms of the remaining (n − r) unknowns.
The general form of a linear system of equations can be presented by the formula: A xi = Bi
Coefficient matrix
is the matrix which contains the variables coefficients (A matrix in the formula).
Constant matrix
is the array of the free column values (Bi vector array).
Augmented matrix
is the combined matrix which contains the Coefficient matrix and Constant matrix side by side (ABi matrix).
Example: Solve the system of linear equations of three variables x, y and z:
x − y + 2z = − 2
3x − 2y + 4z = − 5
2y − 3z = 2
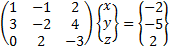
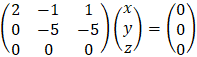
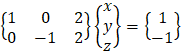
Consider the system of linear equations containing three variables x, y and z.
this equations cab be written in matrix notation as:
One way to solve the equations is by row transformation on the augmented matrix.
From the third line it is obvious that z = 0
From second line: y − 2z = 1 → y = 1
From first row: x − y + 2z = − 2 → x = − 1
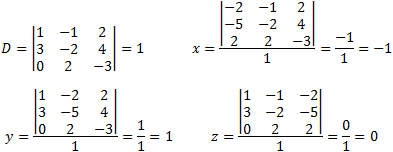
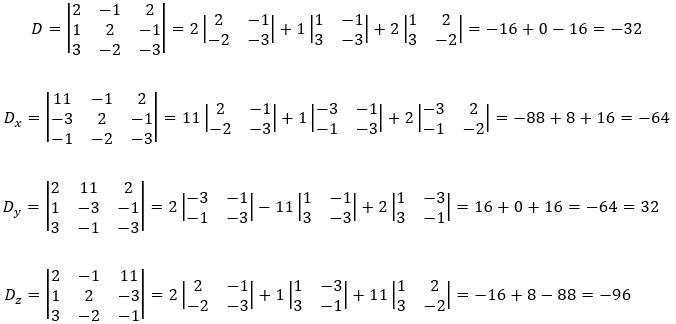
Solving the above equations by Cramer' s rule.
Solve the above equations by Cramer' s rule.
Example: Solve the system of the linear equations:
x + 2y − 3z = 4
x + 3y + z = 11
2x + 5y − 4z = 13
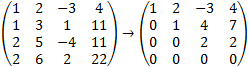
2x + 6y + 2z = 22
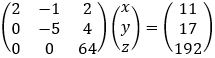
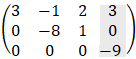
After performing rows operations, we get the upper triangular matrix:
It is seen that r = n (rank = number of variables) therefore the equations have a unique solution:
z = 1 y = 3 x = 1 or in vector representation (1, 3, 1)
Example: Solve the system of the linear equations:
x + 2y − 2z + 3w = 2
2x + 4y − 3z + 4w = 5
5x + 10y − 8z + 11w = 12
The result is that r < n (r = 2 n = 4)
r − Rank of the matrix − total non zero rows
n − Number of variables
Because r − n = 4 − 2 = 2 two variables are dependent on the other two variables and we have to choose certain values for two variables
for example: w = a and y = b (a, b are any number) then:
z = 1 + 2a
x = 4 − 2b + a
The solution space vector is (4 + a − 2b, b, 1 + 2a, a)
for example if we choose: a = 1 b = − 1 then the solution is: (7, − 1, 3, 1).
Example: Solve the system of the linear equations:
2x + y − 2z + 3w = 1
3x + 2y − z + 2w = 4
3x + 3y + 3z − 3w = 5
From the last row it is observed that: 0 = 8 certainly, this is not possible, hence
this set of equations don't have a solution.
Examples - 2 solving linear system by different methods
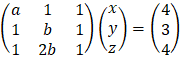
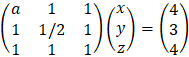
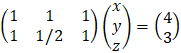
Solve the following system of the linear equations, investigate the answers.
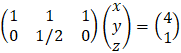
To make solution easier we will subtract 3rd row from the 2nd row to get the following system of equations
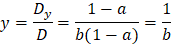
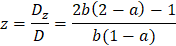
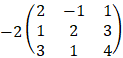
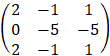
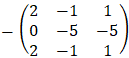
By Cremer's rule we have the following determinants:
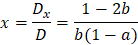
The solutions are:
We can see that for valid solution we have the condition: b ≠ 0 and a ≠ 1
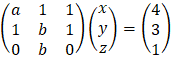
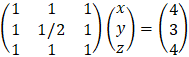
If b = 1/2 than the given equation is:
Now we can clearly see that when a = 1 then the 1st and 3rd equations are the same.
And we get only two equations for three variables as follows
We can now subtract 2nd row from the 1st row to get the set of equations:
From the second row we immediately see that the value of y is: y = 2 and we get from the first row the solution
x = 2 − z and we see that there is infinite number of solutions.
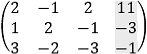
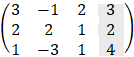
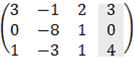
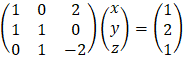
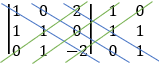
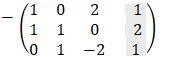
The augmented matrix (including free term) of this set of equations is:
by row transformation method we get:
Description
Operation
Result
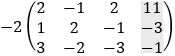
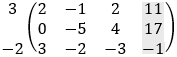
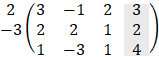
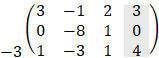
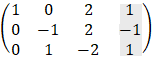
Multiply 1st row by 2 and 2nd row by -3 and add both rows
→
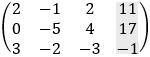
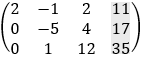
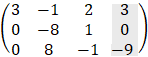
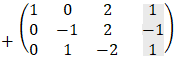
Multiply 3rd row by -3 and add it to the 1st row
→
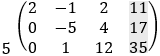
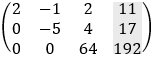
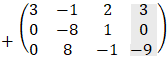
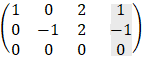
Add rows two and three to get the final value
→
From the result we see that the rank of the coefficient matrix (3 columns from the left - variable matrix) is Rc = 2
while the rank of the augmented matrix is Rg = 3 therefore there is no solution to this problem.
We can summarize the rules of the existence of solutions by the following facts:
a)
A linear system of m equations and n unknowns will have a solution only if the rank of the augmented matrix equals that of the coefficient matrix (Rc = Rg).
b)
If the augmented matrix and the coefficient matrix has the same rank and the rank equals the number of the unknowns, then a unique solution exist (Rc = Rg = n).
c)
If the augmented matrix and the coefficient matrix have the same rank but the rank is less then the number of
unknowns (Rc = Rg < n), then at least one set of number of rank unknowns can be
solved in terms of the remaining (n - r) unknowns.
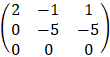
Solve the following homogeneous system of linear equations.
2x − y + z = 0
x + 2y + 3z = 0
3x + y + 4z = 0
It is obvious that the trivial solution is: x = y = z = 0, we can say that every system of
linear equations have that solution. Notice that the rank of the coefficients and the augmented
matrix are the same.
Description
Operation
Result
Multiply 2nd row by −2 and add it to 1st row
→
Subtract first row from the third row
→
And we get the final set of equations
The rank of the coefficients and the augmented matrices are the same and equal to, Rc = Rg = 2
Because the number of variables is 3 then R is less then n (2 < 3) and we have a non zero solution which depends on the value of the third variable that can get infinite number of values:
y = −z and x = −z for example if z = −1 then the result is (1, 1, −1)
The determinant is equal to 0 so we have at least two identical rows.
Description
Operation
Result
Subtract first row from the second row
→
And we get the final set of equations
→
The system of equations is now:
Because Rc = Rg = 2 and number of variables is n = 3 < Rg then 2 variables can be expressed by the third variable, and we get infinite number of solutions:
The set of equations are:
And the solutions are:
x + 2z = 1
x = 1 − 2z
−y + 2z = −1
y = 2z + 1
Notice that the solution of x and y are a function of any value of z.